
Visit the YouTube channel for more content.

▶
Refreshing YCB for the Next Era of Embodied AI | Steve Xie × Prof. Sidd Srinivasa
Lightwheel •
Sep 23, 2025

▶
Long Range Navigator: Extending robot planning horizons beyond metric maps
Personal Robotics Lab •
Apr 18, 2025
▶
Lessons Learned from Designing and Evaluating a Robot-assisted Feeding System for Out-of-lab Use
Personal Robotics Lab •
Dec 30, 2024

▶
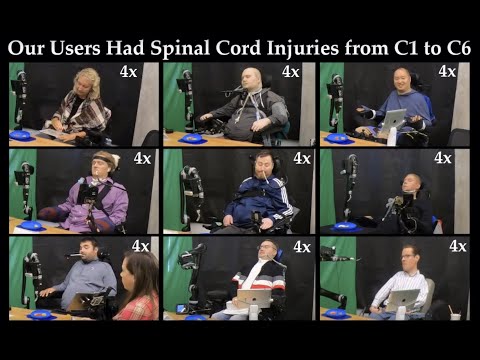
Multi-user, Out-of-lab Study of a Robot-assisted Feeding System for People with Motor Impairments
Personal Robotics Lab •
Dec 30, 2024

▶
In-home Deployment of a Robot-assisted Feeding System for People with Motor Impairments
Personal Robotics Lab •
Dec 30, 2024

▶
Data Efficient Behavior Cloning for Fine Manipulation via Continuity-based Corrective Labels
Personal Robotics Lab •
Oct 09, 2024

▶
Robot-Assisted Feeding: Recent Advances And Future Directions In The Personal Robotics Lab
UWSpinalCordInjury •
Jul 09, 2024

▶
Physics-based Manipulation With and Around People: Siddhartha Srinivasa (Allen School)
Paul G. Allen School •
Feb 06, 2024

▶
An Adaptive, Safe, and Portable Robot-Assisted Feeding System
Personal Robotics Lab •
Jan 23, 2024

▶
Ethan Gordon, Univ. of Washington: Tractably Adaptable Food Manipulation for Robot Assisted Feeding
Northwestern Robotics •
Nov 01, 2023

▶
Demonstration: Towards General Single-Utensil Food Acquisition with Human-Informed Actions
Personal Robotics Lab •
Oct 17, 2023
![From Crowd Motion Prediction to Robot Navigation in Crowds [IROS 2023]](https://i.ytimg.com/vi/mzFiXg8KsZ0/hqdefault.jpg)
▶
From Crowd Motion Prediction to Robot Navigation in Crowds [IROS 2023]
Christoforos Christos Mavrogiannis •
Jul 28, 2023
![PuSHR: A Multirobot System Nonprehensile Rearrangement [IROS 2023]](https://i.ytimg.com/vi/nyUn9mHoR8Y/hqdefault.jpg)
▶
PuSHR: A Multirobot System Nonprehensile Rearrangement [IROS 2023]
Christoforos Christos Mavrogiannis •
Jul 24, 2023
▶
Unintended Failures of Robot-Assisted Feeding in Social Contexts
Personal Robotics Lab •
Feb 18, 2023

▶
Design Principles for Robot-Assisted Feeding in Social Contexts
Personal Robotics Lab •
Feb 18, 2023

▶
Taylor Kessler Faulkner - Enabling Robots to Adapt to and Learn from Real People
Talking Robotics •
Feb 15, 2023
▶
Analyzing Multiagent Interactions in Traffic Scenes via Topological Braids
Personal Robotics Lab •
Nov 08, 2022

▶
Winding Through: Crowd Navigation via Topological Invariance
Personal Robotics Lab •
Nov 08, 2022
![Analyzing Multiagent Interactions in Traffic Scenes via Topological Braids [ICRA 2022]](https://i.ytimg.com/vi/Q7xZPFj52lQ/hqdefault.jpg)
▶
Analyzing Multiagent Interactions in Traffic Scenes via Topological Braids [ICRA 2022]
Christoforos Christos Mavrogiannis •
Oct 04, 2022

▶
Not All Who Wander Are Lost: A Localization-Free System for In-the-Wild Mobile Robot Deployments
Nick Walker •
Jul 12, 2022
![[CS 6751] Interactive QnA - Siddhartha Srinivasa (University of Washington / Amazon Robotics)](https://i.ytimg.com/vi/S1u3x-AgtK8/hqdefault.jpg)
▶
[CS 6751] Interactive QnA - Siddhartha Srinivasa (University of Washington / Amazon Robotics)
EmPRISE Lab •
Jun 29, 2022

▶
Not All Who Wander Are Lost: A Localization-Free System for In-The-Wild Mobile Robot Deployments
ACM SIGCHI •
May 11, 2022

▶
Q&A with Sidd Srinivasa, director of Amazon Robotics AI
Amazon Science •
Oct 08, 2021

▶
ICRA 2021 Curiosity Workshop: Siddhartha Srinivasa
ICRA 2021 Curiosity Workshop •
Aug 03, 2021

▶
RSS 2021, Spotlight Talk 25: Modeling Human Helpfulness with Individual and Contextual Factors...
Robotics Science and Systems •
Jul 15, 2021

▶
Meet a Roboticist | Small Meets Big | KiwiCo
KiwiCo •
Jun 20, 2021

▶
Learning for Caregiving Robots - ICRA 2021 Workshop
Zackory Erickson •
Jun 05, 2021

▶
Grasping with Chopsticks | Model Free Imitation Learning for Fine Manipulation Challenge
Personal Robotics Lab •
Jun 01, 2021

▶
Chris Mavrogiannis
Talking Robotics •
May 12, 2021

▶
Chris Mavrogiannis: Leveraging structure for autonomous robot navigation in multiagent human spaces
Learning and Intelligent Systems Lab, TU Berlin •
Apr 26, 2021

▶
Combating covariate shift ⚔️ for fine manipulation 🥢
Personal Robotics Lab •
Nov 18, 2020
▶
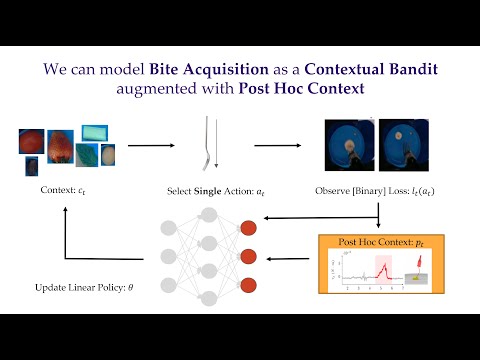
Leveraging Post Hoc Context for Faster Learning in Bandit Settings applied to Robot-Assisted Feeding
Personal Robotics Lab •
Nov 06, 2020

▶
Chopsticks Robot: The Beginning of a Journey
Personal Robotics Lab •
Oct 09, 2020

▶
Adaptive Robot-Assisted Feeding: An Online Learning Framework for Acquiring Previously Unseen Food
Personal Robotics Lab •
Sep 18, 2020

▶
"New Connections between Motion Planning and Machine Learning" - Sidd Srinivasa
Robotics Today •
Jul 27, 2020

▶
What Should I Work On?
Siddhartha Srinivasa •
Jul 13, 2020

▶
Posterior Sampling for Anytime Motion Planning (ICRA 2020)
Personal Robotics Lab •
May 22, 2020

▶
Is More Autonomy Always Better?: Exploring Preferences of Users with Mobility Impairments in ...
ACM SIGCHI •
Apr 06, 2020
▶
Evaluating an Assistive-Feeding Robot with Users with Mobility Limitations
Personal Robotics Lab •
Jan 13, 2020

▶
MuSHR: Multiagent System for NonHolonomic Racing
Personal Robotics Lab •
Jan 07, 2020

▶
Tech Talk with Dr. Sidd Srinivasa
U.S. Army DEVCOM Army Research Laboratory •
Dec 17, 2019
▶
Online Learning for Food Manipulation
Personal Robotics Lab •
Sep 27, 2019

▶
The Blindfolded Robot: A Bayesian Approach to Planning with Contact Feedback
University of Michigan ARM Lab •
Sep 21, 2019

▶
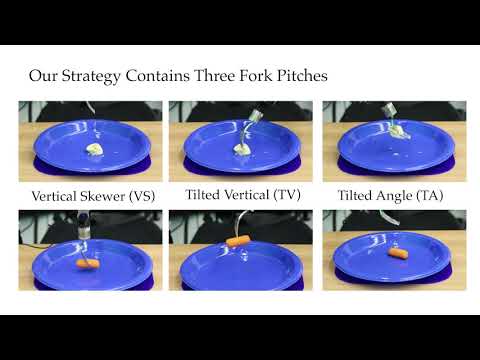
Generalizing Skewering Strategies across Food Items
Personal Robotics Lab •
Sep 04, 2019
▶
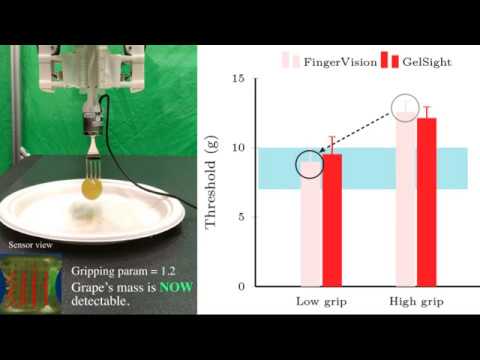
Bite Acquisition with Tactile Sensing
Personal Robotics Lab •
Sep 04, 2019

▶
ICAPS 2018: Aditya Mandalika on "Lazy Receding Horizon A* for Efficient Path Planning in ..."
ICAPS •
Jun 11, 2019

▶
ICAPS 2018: Oren Salzman on "The Provable Virtue of Laziness in Motion Planning"
ICAPS •
May 24, 2019

▶
Towards Robotic Feeding: Role of Haptics in Fork-based Food Manipulation
Personal Robotics Lab •
Jan 19, 2019

▶
Transfer depends on Acquisition: Analyzing Manipulation Strategies for Robotic Feeding
Personal Robotics Lab •
Jan 13, 2019

▶
Autonomous Robot Feeding with Assistive Dexterous Arm (ADA)
Personal Robotics Lab •
Dec 13, 2018

▶
Building a Robot Butler: Towards Fluent Human Robot Interaction
UW Video •
Nov 21, 2018

▶
ICAPS 2017: Efficient motion planning for problems lacking optimal substructure
ICAPS •
Feb 08, 2018

▶
Automated Feeding with Assistive Robot Arm
Personal Robotics Lab •
Nov 16, 2017

▶
Nonprehensile Whole Arm Rearrangement Planning on Physics Manifolds
Personal Robotics Lab •
Oct 19, 2017

▶
RI Seminar: Henny Admoni: Toward Natural Interactions With Assistive Robots
CMU Robotics Institute •
Sep 23, 2017

▶
RI Seminar: Sidd Srinivasa: Robotic Manipulation...
CMU Robotics Institute •
May 04, 2017

▶
Eating Assistance Through Shared Autonomy with An Intelligent Robotic Arm
Personal Robotics Lab •
Apr 14, 2017
▶
UW CSE Colloquia: Siddhartha Srinivasa (CMU)
Paul G. Allen School •
Nov 03, 2016

▶
Distance Metrics and Algorithms for Task Space Path Optimization
Personal Robotics Lab •
Aug 27, 2016

▶
On-line human-robot cooperation
Stefania Pellegrinelli •
Aug 26, 2016

▶
Functional Gradient Motion Planning in Reproducing Kernel Hilbert Spaces
Personal Robotics Lab •
Jul 12, 2016

▶
Formation-Based Multi-Robot Coverage
slide show me •
May 17, 2016

▶
Siddhartha Srinivasa : Manipulation, Robots Performing Complex Tasks
CMU Robotics Institute •
May 13, 2016
▶
Convergent Planning
Personal Robotics Lab •
May 10, 2016

▶
UW CSE Robotics: Henny Admoni, "Recognizing Human Intent for Assistive Robotics"
Paul G. Allen School •
Apr 28, 2016

▶
HERB Pours a Glass of Water
Personal Robotics Lab •
Dec 21, 2015

▶
HERB Stacks Cups
Personal Robotics Lab •
Dec 21, 2015

▶
HERB Sorts Colored Blocks
Personal Robotics Lab •
Sep 18, 2015

▶
Learning Trajectory Constraints from Demonstrations
Personal Robotics Lab •
Jul 29, 2015

▶
An Analysis of Deceptive Robot Motion
Personal Robotics Lab •
Jul 02, 2015

▶
Automated Dining via an Intelligent Robot Arm
Personal Robotics Lab •
Apr 17, 2015
▶
or_rviz Viewer Plugin
Personal Robotics Lab •
Feb 25, 2015

▶
Robust Push Planning Under Uncertainty
Personal Robotics Lab •
Dec 11, 2014

▶
or_ompl - OpenRAVE bindings for OMPL
Personal Robotics Lab •
Oct 27, 2014

▶
Reconfiguration planning using physics models
Personal Robotics Lab •
Oct 22, 2014

▶
17:50 - 18:20 Invited Talk: Siddhartha Srinivasa, CMU - Feedback-driven Physics-based Manipulation
RSS2014 Workshop •
Aug 08, 2014

▶
HERB ProCam Test
Personal Robotics Lab •
Jun 06, 2014

▶
Siddhartha Srinivasa at the FIRST Robotics Competition - Greater Pittsburgh Regional 2014
PIttsburgh FIRST - WPAFIRST •
May 28, 2014

▶
ADA autonomous manipulation
Tekin Meriçli •
May 15, 2014

▶
HERB-Drama: Trailer 1 for "All in the Timing"
Personal Robotics Lab •
Apr 24, 2014

▶
Deliberate Delays During Robot-To-Human Handovers Improve Compliance With Gaze Communication
Henny Admoni •
Mar 25, 2014

▶
HERB Separates OREO Cookie
Carnegie Mellon University •
Mar 11, 2014
▶
Pose Estimation for Contact Manipulation with Manifold Particle Filters
Personal Robotics Lab •
Aug 14, 2013

▶
HERB the Robot Stars in Oreo Video
Carnegie Mellon University •
Mar 08, 2013

▶
Object Search by Manipulation
Personal Robotics Lab •
Mar 08, 2013

▶
HERB manages a library
Personal Robotics Lab •
Dec 19, 2012
▶
Efficient Touch Based Localization through Submodularity
Personal Robotics Lab •
Dec 11, 2012

▶
Physics-Based Grasp Planning through Clutter
Personal Robotics Lab •
Dec 10, 2012

▶
Robotiq Hand Tests
Personal Robotics Lab •
Jul 19, 2012

▶
HERB Draws based on iPAD interface.
BiffBooverton •
May 05, 2012

▶
The Tick bot project
rochak chadha •
May 05, 2012

▶
HerbSemifinal.wmv
roboguyVR4 •
May 05, 2012

▶
Solving Towers of Hanoi with HERB
andrewlycas •
May 05, 2012
▶
Robot Microwaves a Meal
CMU Robotics Institute •
Apr 27, 2012

▶
HERB Prepares a Meal
Personal Robotics Lab •
Apr 26, 2012

▶
Addressing Cost-Space Chasms in Manipulation Planning
dmitryberenson •
Feb 08, 2011

▶
HERB clip from Rocketboom's "Technology and Innovation by Intel, Pittsburgh Labs"
dmitryberenson •
Dec 14, 2010

▶
Manipulation Lab: Do What You Do by Eldridge Gravy & the Court Supreme
CMU Robotics Institute •
Dec 23, 2009

▶
The delivery robot
hrisurvey3 •
Sep 13, 2009